
Team IHMC (Florida Institute for Humans & Machine Cognition) Robotics ended Day 1 of the DARPA Robotics Challenge near the top of the leader board. Their seven points, topped only late in the day by Team Tartan Rescue’s unorthodox CHIMP robot, represented a triumph over multiple tasks beyond the capability of robots working in the field only a few years ago. The IHMC robot, Running Man, opened doors, used power tools, and turned valves. iDigi spoke with Jesper Smith, mechanical engineer for TEAM IHMC Robotics, about the secrets to success in a robotic challenge designed to simulate a real disaster scenario.
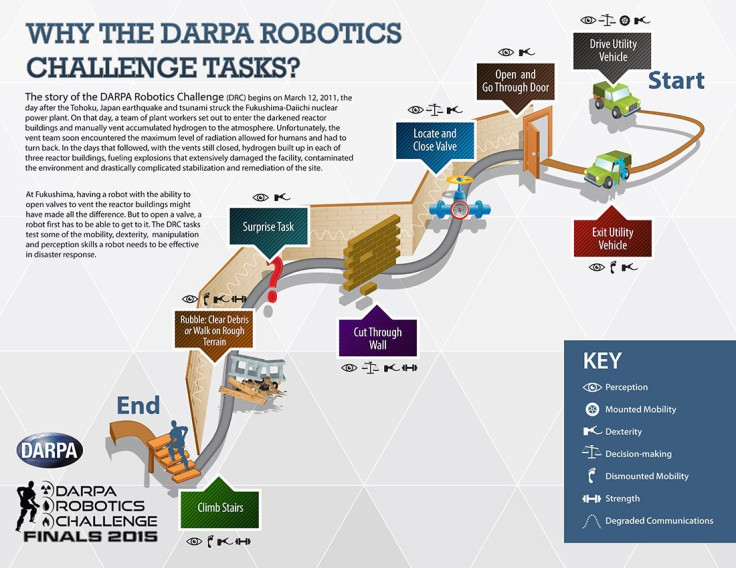
The DARPA Robotics Challenge Tasks:
Team IHMC a the 2013 DARPA Robotics Challenge Trials
The Key to DARPA Robotics Challenge Victory
Focus
While the DARPA Robotics Challenge is about designing a generic robotics platform that can be applied in a number of different disaster scenarios, many of the teams are using the Challenge as an opportunity to test out specific techniques.
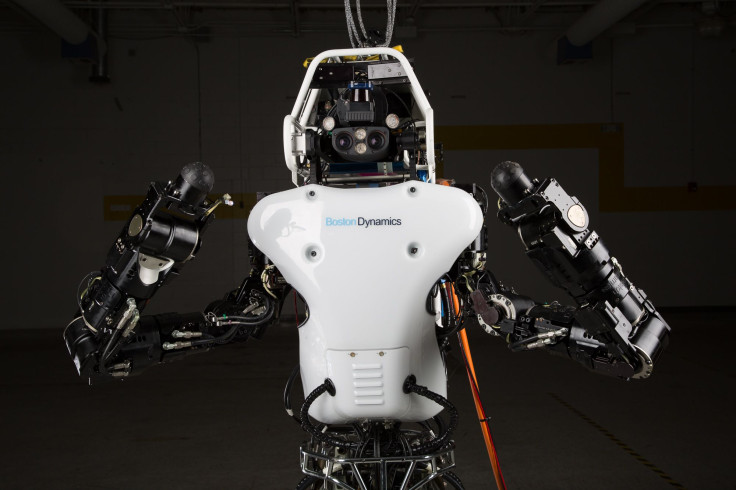
The Team IHMC robot, named Running Man, uses the Atlas platform, a humanoid robot built by Boston Dynamics under the supervision of DARPA (Defense Advanced Research Projects Agency). Of 24 teams participating at the DARPA Robotics Challenge seven use Atlas, applying their own software and algorithms to the standardized body to try and gain a crucial edge against the competition.
For Team IHMC, it all comes down to better movement. “We’re a walking lab. We like to walk,” Smith said. “Atlas comes with a very basic walking algorithm and some teams use it. It’s pretty capable actually, but we think we’re better at walking, so we made our own walking algorithm.”
Human-Machine Interface
A key part of deploying robots to disaster scenarios is having an interface that allows the human to assess what the robot is doing. Like in a real disaster scenario, the DARPA Robotics Challenge has communication bottlenecks, limiting the amount of data that can be sent between the human operators and the robot.
Efficiency is key.
“So you always have this 9600 baud bandwidth, right?” Smith said, describing a state of bottomed out communications so slow it could take 30 seconds to transmit a 2 page document. “That’s enough to send telemetry. Where is the robot? What is the complete configuration of the robot?”
Taking limited data and generating a “3D representation of the world” for the robot operating team takes clever software solutions. Team IHMC has interface software that can take multiple bursts of data, “fitting them together, so that for 30 seconds you know pretty accurately what happened… we know where we are in our 3D world.”
Multiple Sensory Inputs
In a disaster scenario it’s not always possible to stream video over degraded communications, so robots competing in the DARPA Robotics Challenge need to use other data to evaluate their surroundings. For IHMC that meant incorporating frequency data. “For the drill task we actually have a microphone on the robot that detects the frequency of the drill sound and then sends that over the low bandwidth to say ‘Hey, the drill is on,’ or ‘Hey, the drill is off.’”
The DARPA Robotics Challenge is just the beginning of our robot future. For now such simple tasks as negotiating rubble can strain the capabilities of our most advanced robots, developed with millions in private and public funds. But increasingly innovative solutions, pioneered by individual research groups and trial tested at events like the DARPA Robotics Challenge are moving the field forward at an incredible rate.

















{kind=link}